





项目机器人学阿度诺市
除外外外,重要特征之一是企鹅特殊步态,它使机器人美因此,我常强调摇摇欲坠的步态幸运的是,我在这里发现声带 当机器人摇头时 设备与木结构间摩擦 工作进度自然企鹅式声音帮助我很多
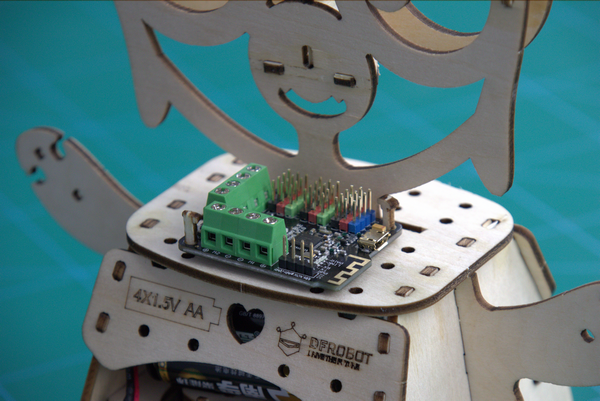
开工RomeoBLE小型-小型Arduino机器人控制板带蓝牙4.0
3级制作方向控制部件
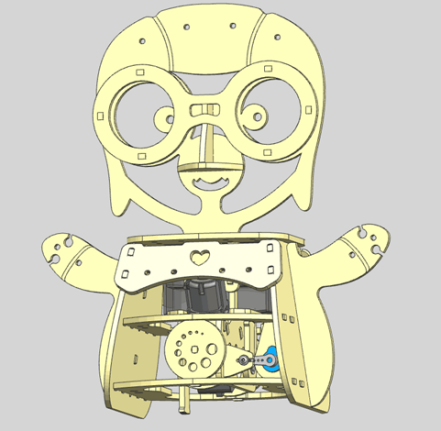
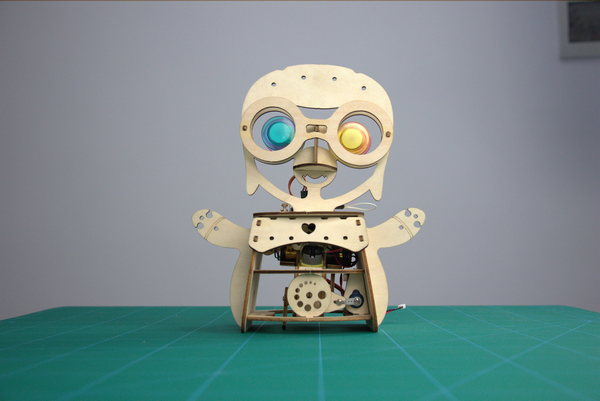
如何制作wobly企鹅 Arduino机器人
DFROBOT
2017年7月18日
768
夏日来加热,作为一个勤奋DIY球迷,我怎么能只吃冰淇淋呢?我需要设计小礼物给你和我自己,一些可爱趣味的东西,小企鹅怎么样?猜它站在你面前眨眼说:'我能帮助你吗?
除外外外,重要特征之一是企鹅特殊步态,它使机器人美因此,我常强调摇摇欲坠的步态幸运的是,我在这里发现声带 当机器人摇头时 设备与木结构间摩擦 工作进度自然企鹅式声音帮助我很多
来检查我的工作
通常我选择正常ArduinoUNO为起始主板不过ArduinoUNO系统内建电动驱动芯片太大,我不得不多买电动驱动扩充板,费用高难连通。幸运的是,我发现RomeoBLE小型棋盘如此适合我的项目小型板与AruinoUNO完全兼容并用小型易安装电机驱动芯片结果,我选择罗密欧BLE微型棋盘为核心棋盘
硬件需要:
开工RomeoBLE小型-小型Arduino机器人控制板带蓝牙4.0
棋盘兼容 ArduinoUNO和Integrats2
二叉塔ProSG90C360度微波1.6Kg
3级TT编码器6V160RPM120:1
4级Wooden基础设施组件
5级多色连接打印霸主三维打印机x2
Click大赛来下载文档三维打印
Click大赛来下载3D设计素描
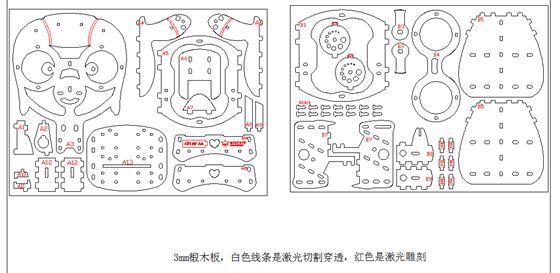
Click大赛来下载CAD文档激光切割
企鹅机器人可推广测试温度DS18B20温度传感器并LCD显示屏.
企鹅机器人可用DS18B20温度传感器测试温度LCD显示屏.
工作进程 :
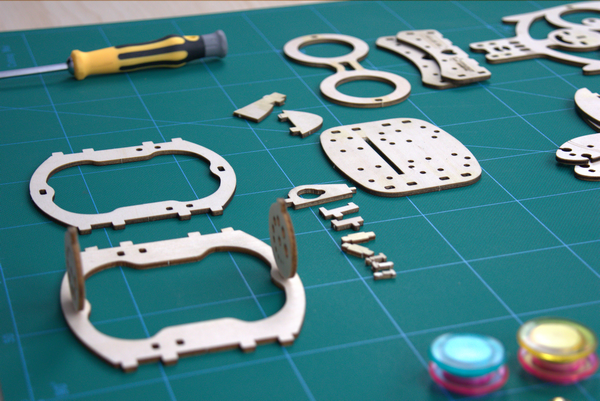
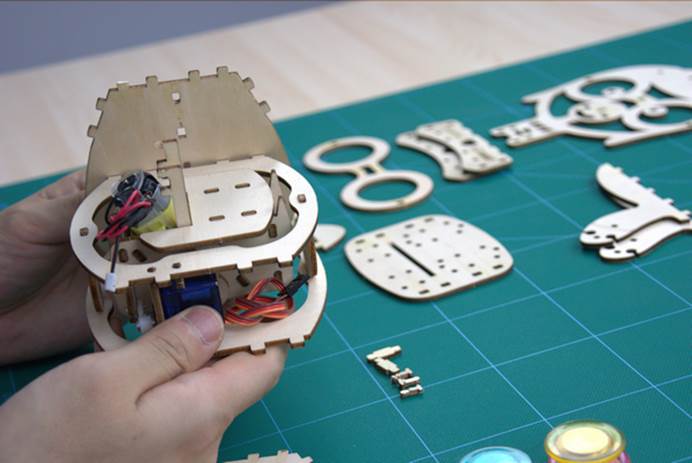
开工取木基构件
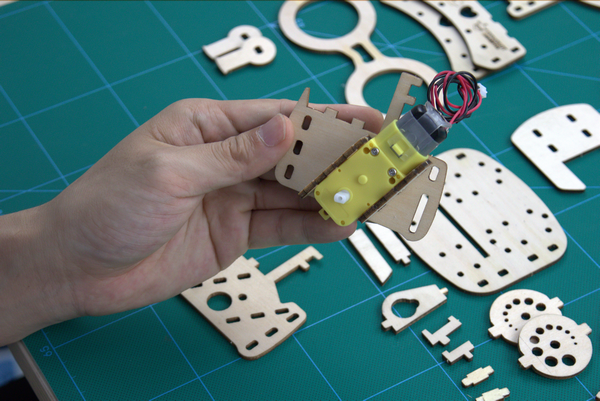
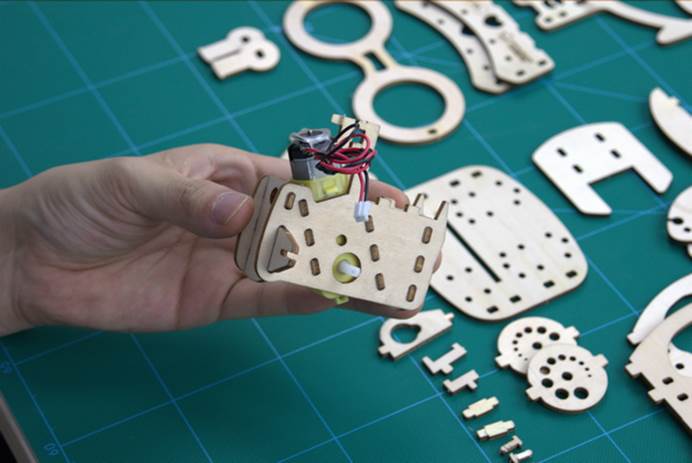
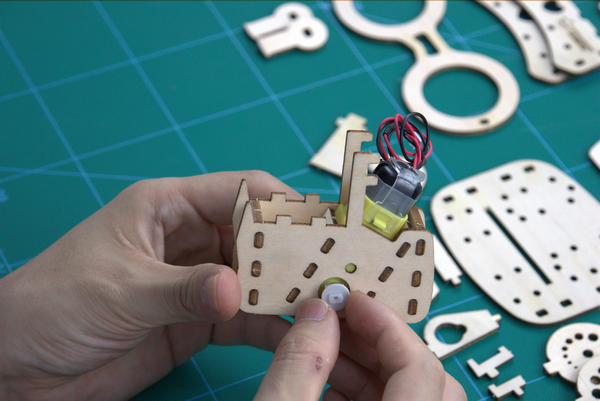
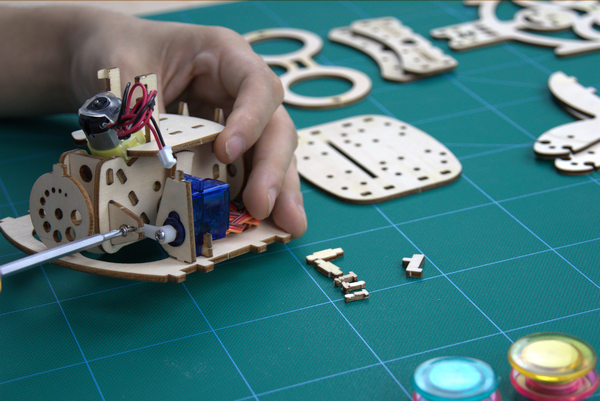
二叉搭建电机零件

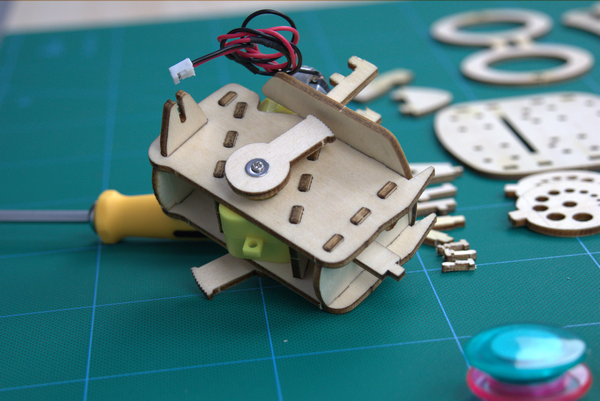
3级制作方向控制部件
万事通
4级完全机组
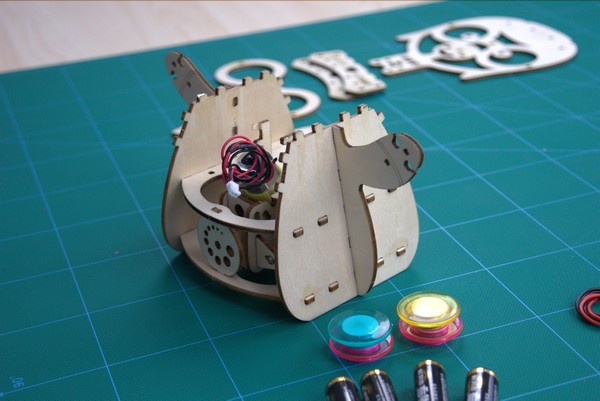
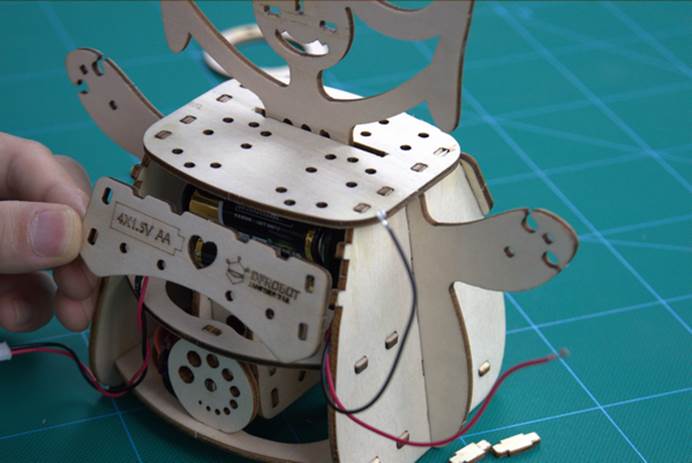
5级完全机器人企鹅
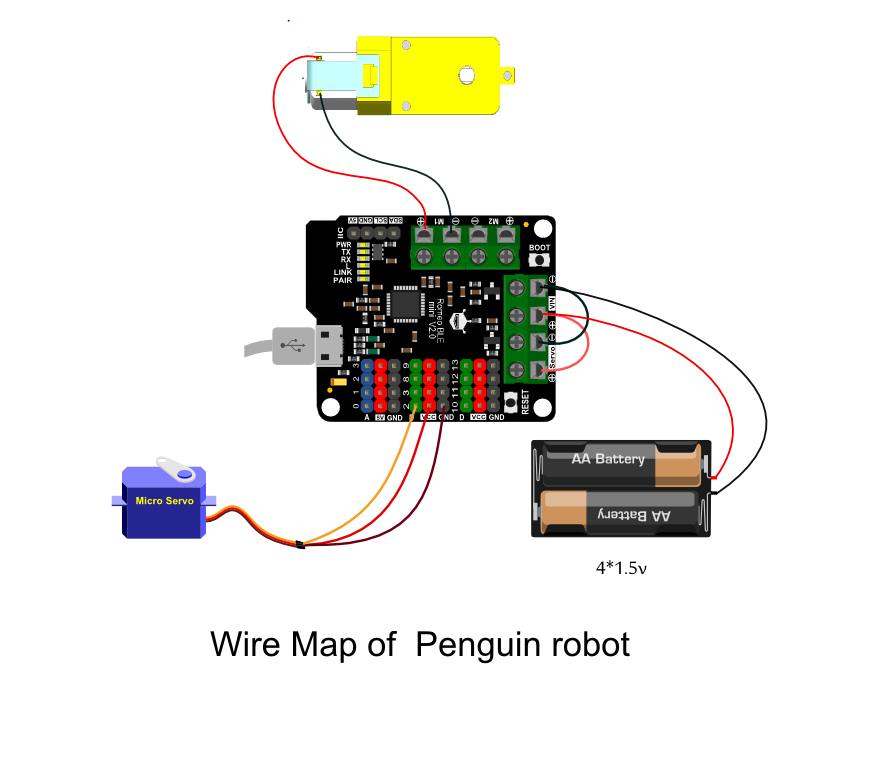
6级连接电路
需要代码如下:
/*file PenguerroBOT.ino*@copyright[DFRobt.com]//www.bctzj.com*/url无效搭建 {pinMode(3,OUTPUT)pinMode(5,OUTPUT)!myservo.attach(2)!digitalWrite(3,LOW)!digitalWrite(5,HIGH)!无效循环{s forx <10X++/ myservo.write(75)/[/b][b]实验结果[/b][b]延迟(500)myservo.write(135)!延迟( 500)myservo.write(115)!延迟( 500)myservo.write(115)!延迟( 500)myservo.write(75)右转延迟3000myservo.write(135);//Turn左延时3000myservo.write(105)!//直接延迟8000}
复习
相关产品


7.50


最近博客

RISC-V可超过X86和ARM
微处理器未来描述:RISC-V、ARM和x86微处理器都竞相塑造计算未来文章中,我们探索这三个架构之间的差异,它们的优缺点,以及它们未来可如何发展
选取指南
2023年11月23日

超声感应器审查:比较DFROBT URM09、HC-SR04、DevantechSRF02和MB1040
文章将深入四类超声波传感器:URM、HCSR04、Devantech和Maxbotix分析工作原理、性能特征和实际应用实例
选取指南阿度诺市
2023年11月23日


 首页
首页
 类别
类别
 购物墨盒
购物墨盒
 哥哥
哥哥