导 言
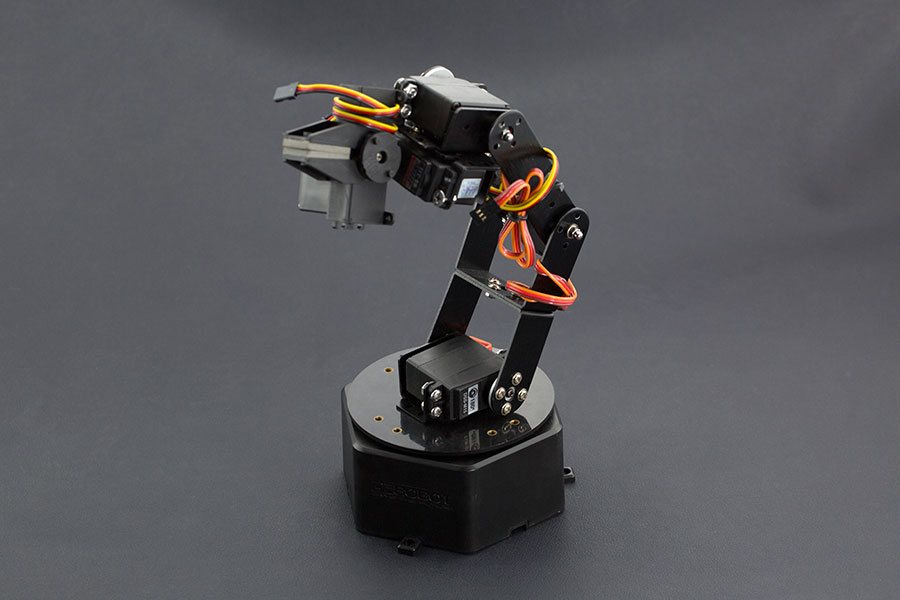
机器人臂覆盖多个领域,包括制造业、医疗处理、安全控制和其他应用做助手 运算符 甚至是工作伙伴 比如JarvisDFLG6DOF为生物机器人臂,由六架servo马达组成,对称臂、肘、手腕2度自由度、五关节和一旋转基结点可移动到一定范围,基点可旋转约180度24频道ervo控制器所有动作都可以通过PC软件控制,支持在线调试和无线控制单词讲,这是一个高成本性能,易于使用机器人臂实战机器人示范平台和二维机器人臂ervo可直接连接arduinoIO或Romeo机器人微控制器,Arduinoservo库更容易使用
规范化
- 操作电压4.8~7.2V
- 最大负载:500g
- 当前操作3A@5V
- 接口类型:XH2.54-3P接口
- 长度(汇编):280毫米
- 高度(集合):340毫米
- 重量:1096g
程序集视频

教程
软件类
- ArduinoiiArduinoi.点击下载 Arduinoi
集合前应校准所有servo,否则你会后悔你可以看视频详解
#包含
瑟沃 myserv//创建servo对象控制servo无效搭建//附注插页9servo对象}虚循环{ myservo.write(90)//设置角可基于需求延迟等待servo实现
问题、建议或酷点分享,请访问RAYBET游戏网DFROBOT论坛.
多文档
 获取6DOF机器人臂DFROBOT存储器或DFROBT分布器.
获取6DOF机器人臂DFROBOT存储器或DFROBT分布器.